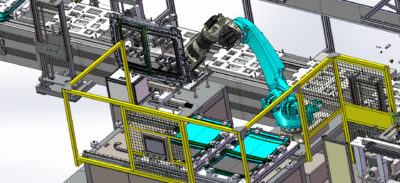
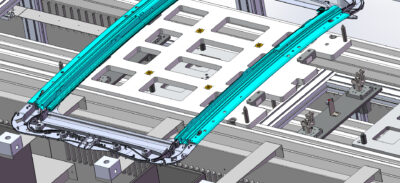
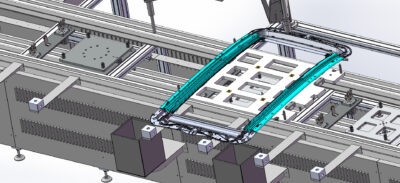
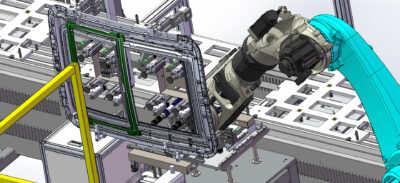
industrial 3D model Car sunroof production line
$150
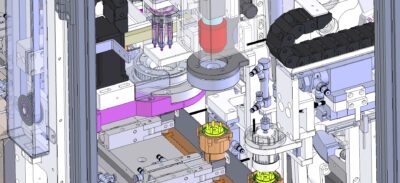
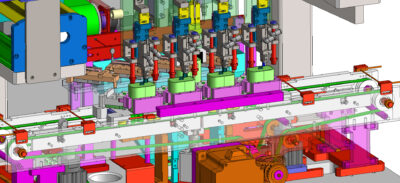
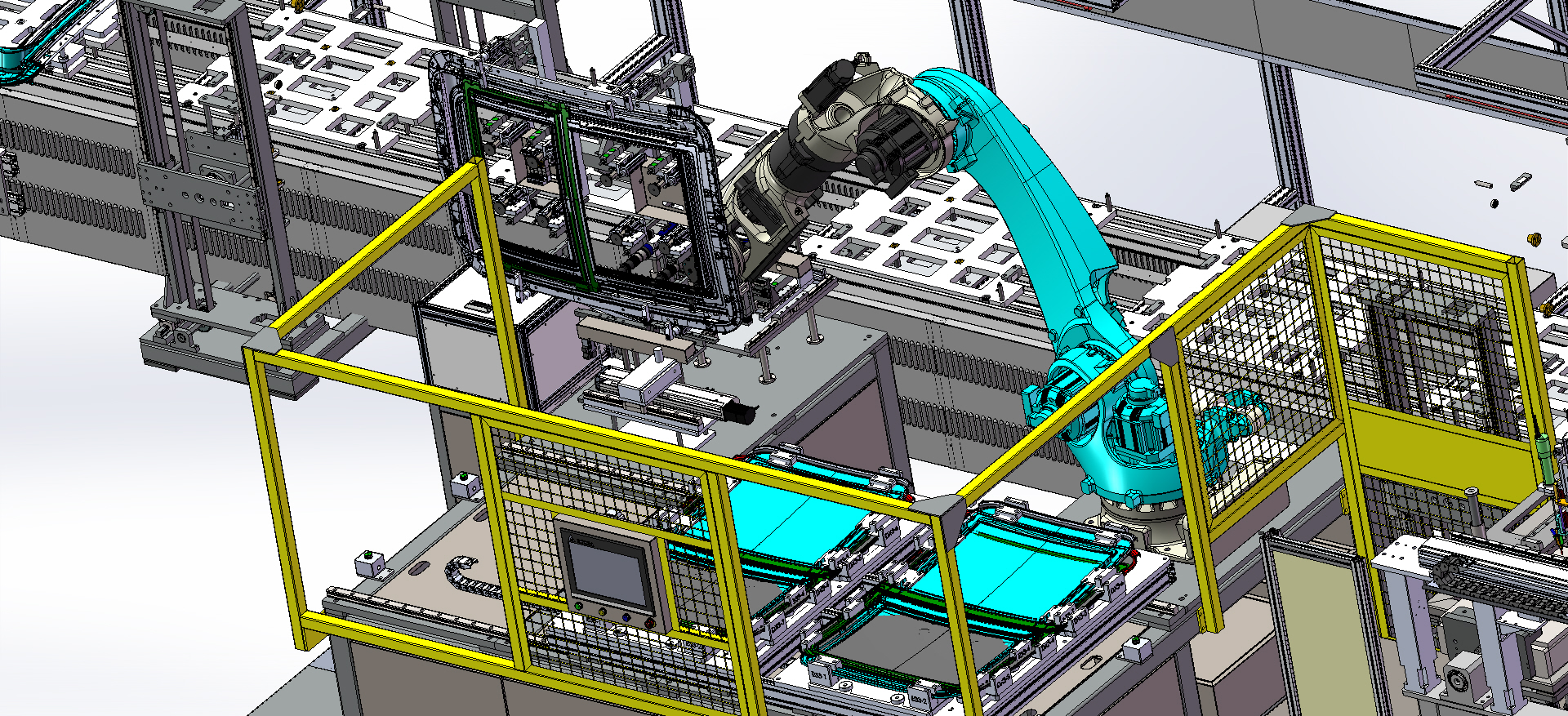
industrial 3D model Car sunroof production line is placed on a double speed chain line for circulation, for stations requiring high precision (engine lock, glass lock) are positioned and assembled independently outside In line, the stations to be adjusted are equipped with precision adjustment mechanism and LVDT. Real-time adjustment ensures that more than 90% of offline products qualify for the first time offline surface difference. .If they are unqualified, they can be repaired manually at the local station to avoid the problem of high product offline failure rate. Kawasaki six-axis robot is used. The drawing reviewer has something to say: the 3D model file of the non-standard automatic panoramic sunroof assembly production line is close to 1G after unpacking, and it will take a certain time to open it’s in SolidWorks, so don’t worry!
Industry use:Equipment
3D model Design software: SolidWorks
3D model Version/edit:SolidWorks2016 [editable, no parameters]
3D model file format:step(stp)x_t
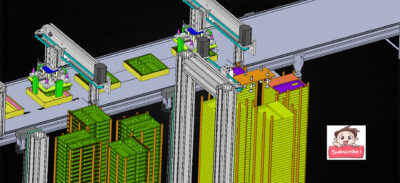
industrial 3D model Car sunroof production line is placed on a double speed chain line for circulation, for stations requiring high precision (engine lock, glass lock) are positioned and assembled independently outside In line, the stations to be adjusted are equipped with precision adjustment mechanism and LVDT. Real-time adjustment ensures that more than 90% of offline products qualify for the first time offline surface difference. .If they are unqualified, they can be repaired manually at the local station to avoid the problem of high product offline failure rate. Kawasaki six-axis robot is used. The drawing reviewer has something to say: the 3D model file of the non-standard automatic panoramic sunroof assembly production line is close to 1G after unpacking, and it will take a certain time to open it’s in SolidWorks, so don’t worry!
Industry use:Equipment
3D model Design software: SolidWorks
3D model Version/edit:SolidWorks2016 [editable, no parameters]
3D model file format:step(stp)x_t
Related products