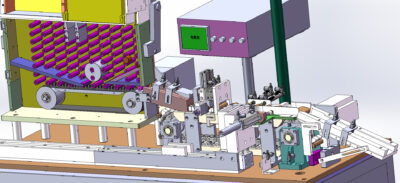
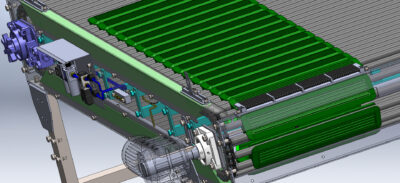
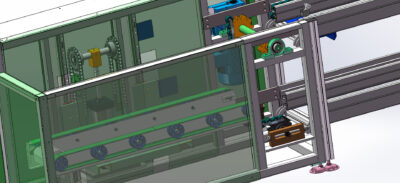
 industrial 3D model Paper Tube Winding Machine This equipment has been mass produced
industrial 3D model Paper Tube Winding Machine This equipment has been mass produced 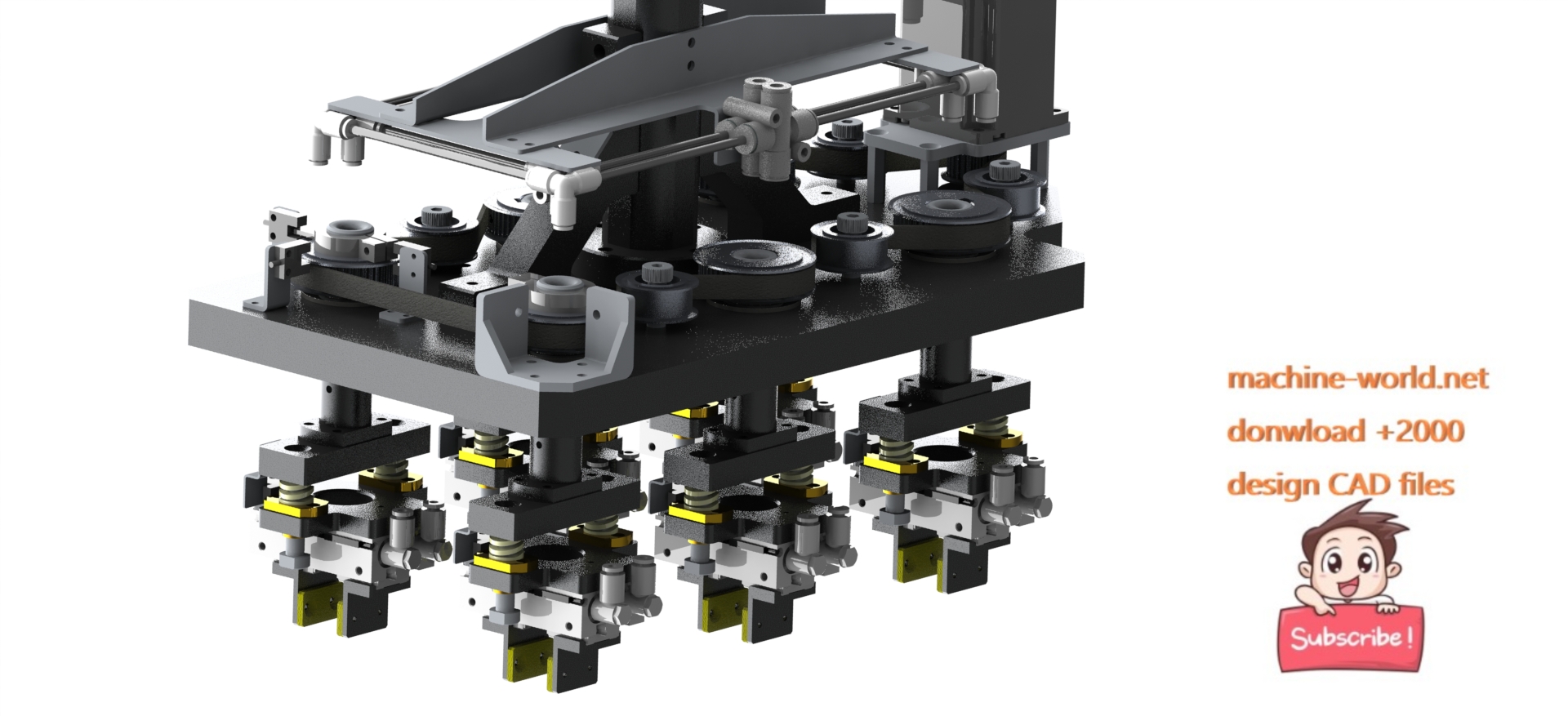

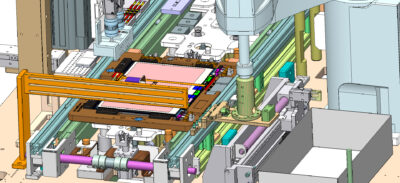
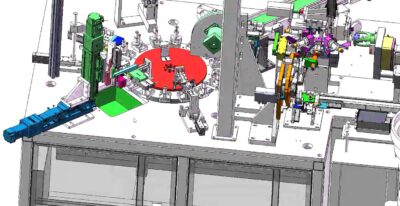
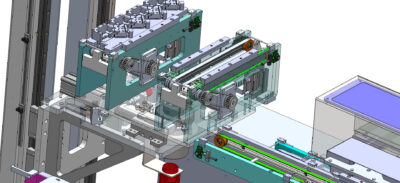
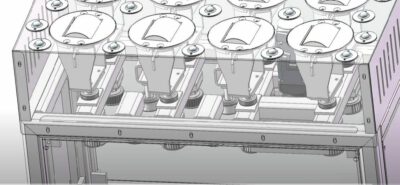
industrial 3D model Robot end shaft pneumatic clamp
$50
This is industrial 3D model Robot end shaft pneumatic clamp. This drawing set is the robot’s ultimate shaft gripper, using a 2×3 layout and 270-degree responsive rotation (electronic limit of 270 degrees and mechanical limit of 280 degrees). exaggeration. The rotation of the clamping unit is controlled by a synchronous belt mechanism with a 1:2 gear ratio. The hand gripper uses a base mechanical clamp, which is more cost-effective. When the gripper is designed, a collision sensor is added to the Z axis to allow 3mm impact on the Z axis to avoid strong impact.
Industry use: Equipment
3D model Design software: SolidWorks
3D model Version/edit:solidworks2018 [editable, including parameters]
3D model file format:step(stp) iges(igs) Sldprt Sldasm easm x_t
This is industrial 3D model Robot end shaft pneumatic clamp. This drawing set is the robot’s ultimate shaft gripper, using a 2×3 layout and 270-degree responsive rotation (electronic limit of 270 degrees and mechanical limit of 280 degrees). exaggeration. The rotation of the clamping unit is controlled by a synchronous belt mechanism with a 1:2 gear ratio. The hand gripper uses a base mechanical clamp, which is more cost-effective. When the gripper is designed, a collision sensor is added to the Z axis to allow 3mm impact on the Z axis to avoid strong impact.
Industry use: Equipment
3D model Design software: SolidWorks
3D model Version/edit:solidworks2018 [editable, including parameters]
3D model file format:step(stp) iges(igs) Sldprt Sldasm easm x_t
Related products
Transport machine-Conveyor list
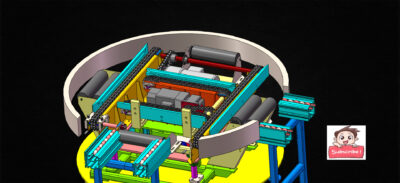
industrial 3D model lifting rotating redirecting products machine
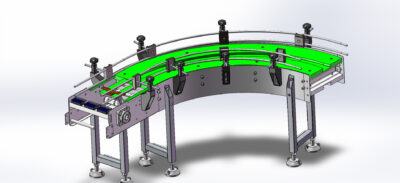
Transport machine-Conveyor list
industrial 3D model Lane separation conveyor carton sorting conveyor
Transport machine-Conveyor list
industrial 3D model 3 speed conveyor, used in assembling household appliances